2. Materials and Methods
The proposed system (
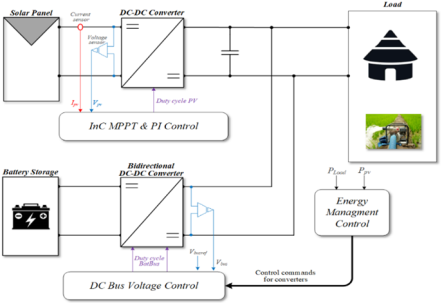
Figure 1), is a direct current microgrid consisting of a photovoltaic array, battery storage and an energy management unit for the simultaneous supply of domestic and agricultural loads. Solar energy is converted via a DC-DC converter controlled by an MPPT conductance increment algorithm, combined with a PI controller, to ensure maximum power extraction. The DC bus, stabilized by capacitive filtering, is the common point of interconnection between the photovoltaic source, the battery and the loads. The storage is coupled to the bus through a bidirectional DC-DC converter, allowing charging in the event of a photovoltaic surplus and discharging when production is insufficient. The voltage regulation of the bus is achieved by a control loop with the PI regulator, ensuring the stability of the system. Finally, an energy management strategy oversees the dynamic distribution of power between source, storage and loads, ensuring continuity of power and optimising the use of available resources.
Figure 1. Synoptic diagram of the system studied.
Component Modeling
In this part, the modeling of the different components of the microgrid is presented. The mathematical equations describing the photovoltaic source, the storage device, the converters and the loads are presented in order to faithfully represent the overall behavior of the system.
2.1. Module PV
The current flowing through a
junction (or an equivalent diode in a photovoltaic cell) is described by the following exponential equation
| [14] | T. Liu and al., «A Novel Simulation Method for Analyzing Diode Electrical Characteristics Based on Neural Networks», Electronics, vol. 10, no 19, p. 2337, sept. 2021,
https://doi.org/10.3390/electronics10192337 |
| [15] | Z. Song and al., «An Effective Method to Accurately Extract the Parameters of Single Diode Model of Solar Cells», Nanomaterials, vol. 11, no 10, p. 2615, oct. 2021, https://doi.org/10.3390/nano11102615 |
[14, 15]
:
The thermal tension is given by:
Where:
: Diode current (A)
: Diode voltage (V)
: Diode saturation current (A)
: Diode ideality factor, a number close to 1.0
: Boltzman constant= 1.3806e-23 J.K-1
Electron charge= 1.6022e-19 C
: Cell temperature (K)
: Number of cells connected in series in a module. This relationship, known as the Shockley equation, reflects the nonlinear behavior of the diode. At low voltages, the current remains close to, while at high direct polarization, it increases exponentially. In the case of solar cells, this model is fundamental to describe the current-voltage (I-V) characteristic of the photovoltaic array and serves as a basis for the electrical modeling of the modules.
Overview of photovoltaic parameters
In order to accurately characterize the electrical behavior of the photovoltaic module studied, the main parameters are summarized in
Table 1. These parameters, provided by the manufacturer under standard test conditions (STC: 1000 W/m
2, AM 1.5 spectrum and 25°C cell temperature), are essential for the modeling and evaluation of PV system performance. They include short-circuit current (
), open-circuit voltage (
), current (
) and voltage (
) at the point of maximum power, maximum power delivery (
), and temperature coefficients of current and voltage. These quantities form the basis of simulation models and allow a consistent comparison between different photovoltaic technologies.
Table 1. PV parameters.
Module | Advance Solar Hydro Wind Power API-150 |
Maximum Power (W) | 150.075 |
Cells per module (Ncell) | 72 |
Open circuit voltage Voc (V) | 41.8 |
Short-circuit current Isc (A) | 5.05 |
Voltage at maximum power point Vmp (V) | 34.5 |
Current at maximum power point Imp (A) | 4.35 |
Temperature coefficient of Voc (%/deg.C) | -0.419 |
Temperature coefficient of Isc (%/deg.C) | 0.096 |
2.2. Modeling of the Battery Energy Storage Chain
(i). Storage Battery
The battery's state of charge (SoC), expressed as a percentage, is defined as follows
| [16] | X. Zhang, J. Hou, Z. Wang, et Y. Jiang, «Study of SOC Estimation by the Ampere-Hour Integral Method with Capacity Correction Based on LSTM», Batteries, vol. 8, no 10, p. 170, oct. 2022, https://doi.org/10.3390/batteries8100170 |
| [17] | M. B. Camara, H. Gualous, F. Gustin, A. Berthon, et B. Dakyo, «DC/DC Converter Design for Supercapacitor and Battery Power Management in Hybrid Vehicle Applications—Polynomial Control Strategy», IEEE Trans. Ind. Electron., vol. 57, no 2, p. 587‑597, févr. 2010,
https://doi.org/10.1109/TIE.2009.2025283 |
[16, 17]
:
(3)
where:
is the state of charge at time t (%),
is the nominal capacity of the battery (Ah),
is the current of the battery at time t (A), considered positive in discharge.
This expression is based on the assumption that the battery is initially fully charged (SoC=100% at t=0). The SoC decreases as the battery drains (> 0) and increases when recharged (< 0). The state of charge (soc) of a battery is the level of charge in relation to its capacity.
The dynamic behavior of the voltage across a battery can be represented by a semi-empirical model integrating ohmic effects, polarization, and internal dynamical phenomena. The instantaneous voltage (
given by the following expression
| [17] | M. B. Camara, H. Gualous, F. Gustin, A. Berthon, et B. Dakyo, «DC/DC Converter Design for Supercapacitor and Battery Power Management in Hybrid Vehicle Applications—Polynomial Control Strategy», IEEE Trans. Ind. Electron., vol. 57, no 2, p. 587‑597, févr. 2010,
https://doi.org/10.1109/TIE.2009.2025283 |
| [18] | L. Chen and al., «Estimation the internal resistance of lithium-ion-battery using a multi-factor dynamic internal resistance model with an error compensation strategy», Energy Reports, vol. 7, p. 3050‑3059, nov. 2021,
https://doi.org/10.1016/j.egyr.2021.05.027 |
| [19] | S. Xie, X. Zhang, W. Bai, A. Guo, W. Li, et R. Wang, «State‐of‐Charge Estimation of Lithium‐Ion Battery Based on an Improved Dual‐Polarization Model», Energy Tech, vol. 11, no 4, p. 2201364, avr. 2023,
https://doi.org/10.1002/ente.202201364 |
| [20] | Y. Wang and al., «A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems», Renewable and Sustainable Energy Reviews, vol. 131, p. 110015, oct. 2020,
https://doi.org/10.1016/j.rser.2020.110015 |
[17-20]
:
(4)
where:
is the instantaneous voltage of the battery (V),
: is the open-circuit electromotive voltage (EMF),
: is a polarization coefficient (V),
is the maximum battery capacity (Ah),
: is the cumulative capacity extracted from the initial instant (Ah),
: is the internal resistance of the battery (Ω),
is the instantaneous current supplied by the battery (A),
and are constants associated with nonlinear dynamic behavior,
is a conditional indicator factor (e.g., 1 in discharge and 0 in charge or vice versa).
This model allows you to take into account:
The ohmic voltage drop via the term,
Voltage loss due to polarization, modeled by the term ,
A relaxation or transient response effect via the exponential term as well as an additional conditional adjustment by the last term.
In order to preserve battery life and ensure safe operation, the SoC is constrained within a permissible range defined by
| [20] | Y. Wang and al., «A comprehensive review of battery modeling and state estimation approaches for advanced battery management systems», Renewable and Sustainable Energy Reviews, vol. 131, p. 110015, oct. 2020,
https://doi.org/10.1016/j.rser.2020.110015 |
[20]
:
(5)
Where:
: corresponds to the maximum permitted depth of discharge,
: is the maximum load level allowed.
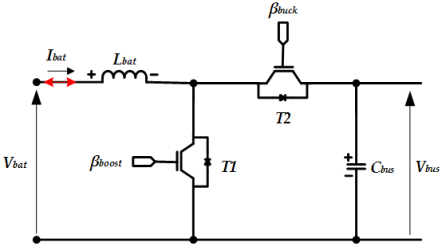
(ii). Topologie du Convertisseur DC–DC Bidirectionnel
Figure 2 shows a non-isolated bidirectional DC–DC converter that interfaces between the battery (
) and the DC bus (
). The structure consists of a series inductor
, two controlled switches (βboost and βbuck) associated with their anti-parallel diodes (
et
), and a capacitor
that stabilises the bus voltage.
In boost mode (battery discharge), the βboost switch modulates the current in the inductance, allowing energy to be transferred to the bus via the diode. In buck mode (battery charge), βbuck controls the transfer of energy from the bus to the inductance and battery, while provides a free path for the current to flow.
This bidirectional topology ensures efficient energy exchange between the storage element and the DC bus, making it particularly suitable for PV systems and hybrid microgrids.
The model of the bidirectional converter is given by the system of the equation (
6)
(6)
Presentation of the system's electrical parameters
In order to simulate and analyze the behavior of the energy storage system, the characteristic electrical parameters of the battery and the bidirectional DC-DC converter were defined. These values are based on realistic technical data and are compatible with the specifications of medium-power industrial applications, such as electric vehicles or stationary hybrid systems.
The battery is modeled using the equations presented earlier, with parameters reflecting a high-capacity cell. The constants of the model (such as internal resistance, polarization coefficient, or dynamic constants) were adjusted to reproduce realistic behavior under load and discharge.
The bidirectional DC-DC converter, which ensures the transfer of energy between the battery and the DC bus, is characterized by a smoothing inductor, a bus capacitor and a switching frequency suitable for DC or DC control.
The table below summarizes all the electrical parameters used in the model:
Table 2. Battery and Bidirectional DC-DC Bus Electrical Parameters.
Electrical Parameters | Values |
Battery source |
| 648 Ah |
| 200 V |
| 0.0029 |
| 0.0038 |
| 21.16 |
| 0.094 |
| 50% |
DC-DC bidirectional converter |
| 3300µF |
: Inductance | 1mH |
| 10 kHz |
As part of the system regulation, the parameters of the PI controllers were determined to ensure a compromise between stability and speed of response.
Table 3 summarises the coefficients used:
Table 3. PI Controller Parameters.
Coefficients | Values |
| 0.05 |
| 0.01 |
| 100 |
| 1100 |
: the proportional gain of the current regulator, which is responsible for the immediate correction of the measured error.
: the full gain of the current regulator, which reduces static error by taking into account the accumulated deviations.
: the proportional gain of the voltage regulator, acting on the rate of correction of the deviation between the set voltage and the measured voltage.
: the full gain of the voltage regulator, intended to ensure the gradual elimination of the tracking error.
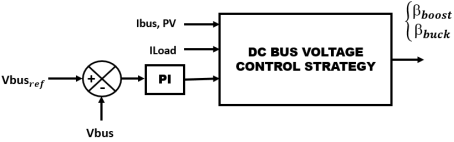
In
Figure 3, we present the DC bus voltage regulation strategy.
Figure 3. DC Bus Voltage Regulation Strategy.
This figure shows a DC bus voltage regulation strategy in this microgrid system. The principle is based on the comparison between the measured voltage of the Vbus bus and its reference value Vbus, ref. The deviation generated is processed by a PI (Proportional-Integral) regulator, which allows to dynamically correct variations and guarantee the stability of the voltage.
Additional input signals, such as the current from the photovoltaic array (Ibus,pv) and the load current (ILoad), are taken into account in order to adapt the control according to the production-consumption balance. This information is sent to the DC Bus Voltage Control Strategy block, which generates control signals denoted as βboost and βbuck.
These coefficients correspond respectively to the boost and buck modes of the bidirectional converter, thus ensuring optimal regulation of the DC bus voltage despite fluctuations in load or renewable production.
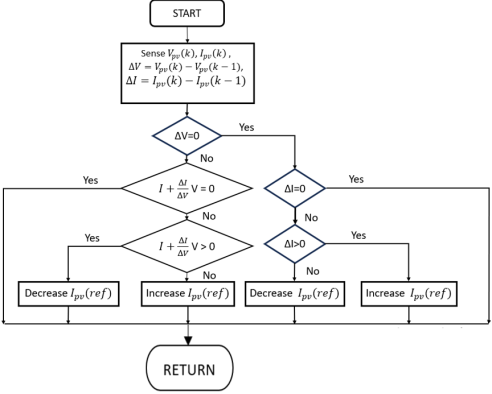
(iii). MPPT Increment
In
Figure 4, we present the Maximum Power Point Tracking (MPPT) algorithm based on the Incremental Conductance method
| [22] | «Hybrid, optimization, intelligent and classical PV MPPT techniques: Review», CSEE JPES, 2020,
https://doi.org/10.17775/CSEEJPES.2019.02720 |
| [23] | R. B. Bollipo, S. Mikkili, et P. K. Bonthagorla, « Critical Review on PV MPPT Techniques: Classical, Intelligent and Optimisation », IET Renewable Power Gen, vol. 14, no 9, p. 1433‑1452, juill. 2020,
https://doi.org/10.1049/iet-rpg.2019.1163 |
[22, 23]
.
With each iteration, the system measures the voltage and the current delivered by the photovoltaic array, then calculates the instantaneous variations et . These two quantities allow us to evaluate the discrete derivative of power with respect to voltage:
The operating condition at the maximum power point (MPP) is reached when , that is, when the instantanous conductance is equal to the incremental conductance .
The algorithm compares these two conductances to dynamically adjust the reference current setpoint .
1) If , the system is to the left of the MPP and the algorithm is increasing to move the operating point to a higher voltage.
2) If , the system is to the right of the MPP and is decreased in order to reduce the operating voltage.
3) Finally, when , the generator operates at its maximum power point, and no change in is carried out.
The decision-making scheme presented also handles special cases where ou , to avoid dividing by zero and to maintain tracking stability. This approach provides real-time adaptive control of the operating point, allowing for better tracking accuracy and increased responsiveness to rapid irradiance and temperature variations, while limiting oscillations around the MPP.
Figure 4. The incremental conductance algorithm.
(iv). Energy Management
The EMS is the decision-making level. It receives the measured quantities (PV power, power consumption, battery SoC, bus voltage) and calculates the power sharing instructions according to a pre-established strategy (prioritization of PV energy, maintenance of bus voltage, battery fallback if deficit, battery recharge in case of surplus). Decision rules can be formulated by deterministic logics (thresholds and priorities), optimizing strategies (cost minimization or maximization of self-consumption) or predictive approaches. The outputs of the EMS are power/current commands transmitted to the converters' control loops.
In
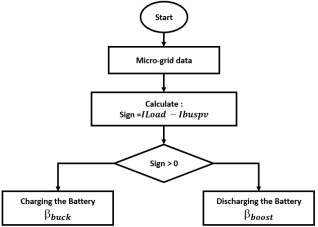
Figure 5, we present the energy management algorithm in a micro-PV-battery grid.
Figure 5. Energy management algorithm in a micro-PV-battery grid.
The algorithm shown in
Figure 5 shows the energy management strategy adopted within the photovoltaic micro-grid integrating a battery storage system. The objective of this decision-making logic is to ensure the dynamic balance between the power produced by the photovoltaic array and the power demanded by the load, while optimizing the use of the battery.
First, the data from the system is acquired, namely the current supplied by the photovoltaic array (Ibuspv) and the current demanded by the load (ILoad). From these metrics, a decision variable denoted Sign is computed according to the following relationship:
This variable is used to determine the energy state of the system:
If Sign>0, The demand of the load is higher than the photovoltaic production. The energy deficit is then compensated by discharging the battery via a voltage step-up converter (Boost).
If Sign<0, photovoltaic production exceeds demand. The excess is stored in the battery through a step-down converter (Buck).
The Sign=0 case corresponds to a situation of perfect equilibrium between production and demand, in which the battery does not intervene.
Thus, the algorithm ensures adaptive and autonomous energy management, allowing both the continuity of the load supply and the maximum recovery of the available solar energy. In addition, the use of suitable DC/DC converters (Buck or Boost) ensures efficient energy transfer and helps to preserve battery life.
4. Results and Discussion
The simulation results obtained under overcast and clear skies make it possible to evaluate the performance of the PV-battery system in a rural microgrid with agricultural pumping. The analysis focuses on the evolution of currents, voltages, powers and the state of charge (SOC), in order to highlight the impact of sunlight conditions on the stability of the DC bus, storage management and power continuity.
4.1. Overcast Scenario
Analysis of the evolution of the photovoltaic current and the setpoint
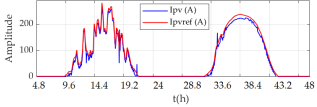
In order to analyze the performance of the MPPT algorithm under overcast conditions,
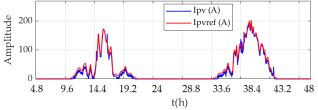
Figure 9 represents the evolution of the measured PV current (Ipv) and the setpoint (Ipvref) over 48 h, covering two consecutive days.
Figure 9. Evolution of the real photovoltaic current (Ipv) and the setpoint (Ipvref).
Under the overcast sky, the photovoltaic current Ipv (blue) closely follows the reference set Ipvref (red). Two daily cycles are observed (≈14 h and ≈38 h), corresponding to the peaks of solar irradiation. The maximum amplitude reaches about 200 A, reflecting good operation of the PV generator. The point deviations between Ipv and Ipvref remain limited and less than 5%, confirming the performance of the MPPT algorithm to ensure fast and accurate monitoring of the setpoint, even during rapid fluctuations due to cloudy passages. The symmetry between the two cycles indicates a reproducibility of the system's behavior over several days. These results validate the efficiency of the regulation in terms of robustness and stability, which are essential to ensure continuous and reliable energy production in the context of rural microgrids and agricultural pumping applications.
Analysis of the current evolution of the PV bus
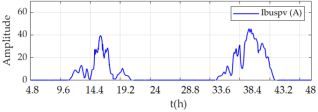
In order to evaluate the dynamics of the DC bus,
Figure 10 presents the evolution of the PV bus current (Ibuspv) over 48 h, allowing to analyze the impact of solar variability on the energy injected and the stability of the system.
Figure 10. PV bus current (Ibuspv).
Figure 10 shows the evolution of the photovoltaic bus
(Ibuspv) power over a 48-hour window. Two distinct daily cycles are observed, with maximum amplitudes of the order of
40 A on the first day and slightly higher
(≈45 A) on the second. The rapid fluctuations around the peaks reflect the effect of cloud passages, confirming the DC bus's strong dependence on incident irradiance. This daily variability conditions the energy actually available for storage and pumping, highlighting the need for a robust energy management strategy to maintain continuity of service.
Relationship between DC bus voltage and setpoint
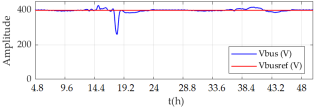
Figure 11 shows the evolution of the DC bus voltage (Vbus) as well as the control setpoint (Vbusref) over a period of 48 hours. The objective is to evaluate the stability of the control under variable conditions, especially in the face of fluctuations in the environment or loads.
Figure 11. Evolution of the DC bus voltage and the setpoint.
The bus voltage (Vbus) (
Figure 11) remains generally around the set point set at 400 V, which attests to a good stability of the regulation over the period observed. However, there are occasional disturbances, particularly around t ≈ 5 p.m., when a sudden drop in voltage to about 250V is observed before a rapid return to the nominal value. This dip likely reflects a rapid change in operating conditions, such as a sudden drop in PV generation or a momentary load on the grid. Another more moderate disturbance is perceptible around t ≈ 39 h, with smaller deviations around the setpoint. Despite these events, the control ensures an effective correction of deviations, thus guaranteeing the continuity of the power supply. These results underline the robustness of the control system, while suggesting the interest of integrating smoothing or storage devices to mitigate the effects of fast transients.
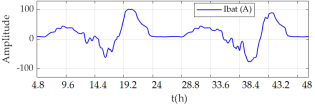
Analysis of battery current and battery bus curves
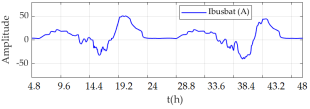
In order to analyze the energy behavior of the storage system, the figure below shows the evolution of the current flowing through the battery (Ibat) as well as the current flowing between the DC bus and the battery (Ibusbat) over a period of 48 hours under overcast conditions.
a) Evolution of the battery current as a function of time
Figure 12. Evolution of Ibat and Ibusbat.
The first curve (
Figure 12) is represented the evolution of the Ibat battery current over a period of 48 hours in a pumping site supplied by a photovoltaic micro-grid. The amplitude of the current varies between +100 A (charging phase) and –100 A (discharge phase), reflecting a marked alternation between the accumulation of solar energy and its release to meet the demand of the pumping system. The profile of Ibat reveals well-defined daily cycles, with significant peaks around t ≈ 7 p.m. and t ≈ 42 h, corresponding to periods of high pumping or episodes of irregular sunshine.
The second curve shows the Ibusbat current, representing the energy exchanges between the DC bus and the battery. This current has a reduced amplitude, around ±60 A, and follows a dynamic similar to that of Ibat, with more attenuated variations. This highlights the role of the DC bus as a buffer interface, absorbing or supplying energy depending on the state of the system, while ensuring a stable power supply to the pump motor.
These results confirm the PV-battery system's ability to adapt to rapidly changing climatic conditions and fluctuations in hydraulic demand. They also highlight the importance of an optimized energy management strategy to ensure continuity of power, limit excessive stress on the battery, and thus extend its life.
After analyzing the battery charge and discharge currents (Ibat) as well as the energy exchanges with the DC bus (Ibusbat), it is relevant to examine the impact of these flows on the overall state of charge of the system. For this purpose,
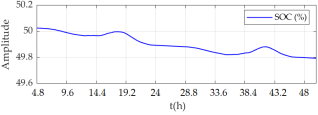
Figure 13 shows the evolution of the battery's State of Charge (SOC) over a period of 48 hours.
Figure 13. Evolution of the battery's state of charge (SOC).
Figure 13 shows the change in the battery state of charge (SOC) expressed as a percentage, over a 48-hour period. There is a relatively small variation in the SOC, ranging from 50% to 49.7%, indicating a quasi-steady state operation of the storage system.
This low amplitude of variation in the SOC reflects an overall balance between the charge and discharge phases, suggesting that the battery operates in a restricted operating area, in order to preserve its lifespan and minimize deep cycling. The slightly decreasing trend in SOC over the entire period could result from energy demand slightly higher than PV production, or from an overall system efficiency slightly lower than the unit.
Slight changes in the profile, visible in particular around t ≈ 7 p.m. and t ≈ 42 h, coincide with the fluctuations observed on the Ibat and Ibusbat currents, confirming the impact of charge/discharge variations on the instantaneous state of charge.
These results underline the importance of fine-grained energy management in PV-battery systems, especially in the context of solar pumping, where continuity of service is highly dependent on the ability of the storage to maintain an optimal level of SOC despite variations in production and demand.
Battery Voltage Variation (Vbat) Analysis:
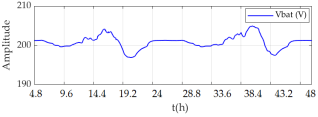
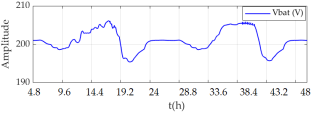
After the analysis of the currents and the state of charge,
Figure 14 shows the temporal evolution of the battery voltage (Vbat) over a period of 48 hours.
Figure 14. Variation of battery voltage (Vbat).
Figure 14 shows the variation in battery voltage (Vbat) between about 195 V and 208 V over 48 hours, reflecting the charge and discharge cycles related to the dynamics of the solar pumping system. The voltage drops observed around t ≈ 7 p.m. and t ≈ 43 h correspond to larger discharge phases, while the increases around t ≈ 3 p.m. and t ≈ 38 h coincide with recharging periods, in connection with photovoltaic energy availability.
The voltage remains overall close to 200 V outside of peaks, indicating effective control of the energy management system, ensuring storage stability and safety. Vbat's moderate modulation helps to limit the premature aging of batteries. This evolution is consistent with the current and state of charge profiles, confirming the good interaction between production, storage and consumption in this microgrid.
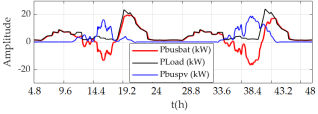
Analysis of power flows in the solar pumping system:
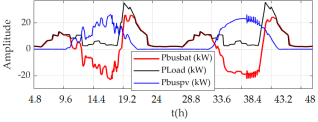
Figure 15 shows the evolution of the PV (Pbuspv), charge (PLoad) and battery (Pbusbat) powers over a 48-hour period in a solar pumping system.
Figure 15. Pbuspv (PV), PLoad (charging) and Pbusbat (battery) powers in kW.
Figure 15 shows the temporal evolution over 48 hours of three key powers in the system: the power injected or taken by the battery via the DC bus (Pbusbat, in red), the charging power of the system (PLoad, in black), and the power produced by the photovoltaic panels (Pbuspv, in blue).
It can be observed that photovoltaic power (Pbuspv) shows significant peaks during the daytime periods, in particular between t ≈ 9 a.m. and 6 p.m. and between t ≈ 35 a.m. and 43 p.m., which corresponds to the hours of maximum sunshine. Outside these ranges, PV production is almost zero, indicating the absence of solar irradiation.
The charging power (PLoad) shows profiles corresponding to the energy needs of the pumping system, with peaks largely coinciding with those of solar production, but also significant consumption during the night (PLoad > 0 while Pbuspv ≈ 0), which implies battery power.
The battery power (Pbusbat) oscillates between positive and negative values, indicating the phases of charge (positive power) and discharge (negative power) respectively. For example, during peaks in PV production, Pbusbat is positive, reflecting a recharge of the battery with excess energy. Conversely, when the load is sustained while PV production is low or zero (especially in the evening or early morning), Pbusbat becomes negative, indicating the discharge of the battery to power the charge.
Notably, around t ≈ 7 p.m. and t ≈ 42 h, there are marked fluctuations with rapid transitions between load and discharge, reflecting the dynamic response of the system to variations in demand and production. These cycles underline the importance of fine-grained and responsive energy management to ensure continuity of service and optimize battery life.
This figure highlights the central role of the battery as an energy buffer between the intermittent production of photovoltaics and the variable demand of the pumping system, ensuring a dynamic balance between injection and withdrawal of energy on the DC bus.
4.2. Clear Sky Scenario
In this part, we have analyzed the performance of the PV-battery system in clear sky conditions.
Analysis of the evolution of the photovoltaic current and the setpoint
In order to evaluate the performance of the MPPT control applied to the photovoltaic array,
Figure 16 shows the comparison between the measured PV current (Ipv) and its reference current (Ipvref) over a 48-hour period.
Figure 16. Evolution of the real photovoltaic current (Ipv) and the setpoint (Ipvref).
Figure 16 shows the temporal evolution of the current delivered by the photovoltaic array (Ipv, in blue) and the associated reference current (Ipvref, in red) over a period of 48 hours. These curves are used to evaluate the performance of the Maximum Power Point Tracking (MPPT) controller.
It can be observed that during the sunlight phases (≈ 9 a.m. to 7 p.m. and ≈ 33 p.m. to 43 p.m.), Ipv closely follows Ipvref, reflecting a good accuracy of the MPPT control. Rapid variations of Ipvref, particularly visible between 12 and 18 h, are effectively monitored by Ipv, despite the presence of fluctuations related to system dynamics or rapid irradiance perturbations.
The gap between the two curves remains small overall, indicating that the controller manages to quickly adjust the operating point of the PV array in response to variations in sunlight. The adequacy between Ipv and Ipvref thus confirms the robustness and responsiveness of the control strategy implemented. In the absence of irradiation (t < 9 a.m., t ≈ 7 p.m. to 33 p.m., and t > 43 h), the two currents cancel each other out, as expected.
Analysis of the current evolution of the PV bus
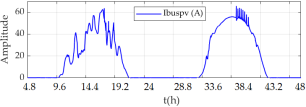
Figure 17 shows the current injected into the DC bus by the photovoltaic array (Ibuspv), highlighting the solar production profiles over a 48-hour period.
Figure 17. PV bus current (Ibuspv).
Figure 17 shows the current injected on the DC bus (Ibuspv) by the photovoltaic array over 48 hours, under clear sky conditions. The observed profile, with gradual increases in the morning, plateaus in the middle of the day, then decreases in the late afternoon (≈ 9–19 h and ≈ 33–43 h), is characteristic of stable and regular solar production.
The current peaks at about 60 A, indicating operation close to the point of maximum power. The absence of major disturbances or sudden fluctuations confirms the good performance of the system in terms of regulation and injection. The slight oscillations observed around t ≈ 38.5 h remain limited and do not alter the overall stability. This behavior validates the effectiveness of the PV system and its control under optimal conditions.
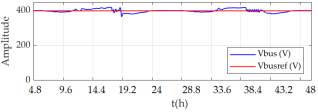
Relationship between DC bus voltage and setpoint
Figure 18 is used to evaluate the voltage stability of the DC bus by comparing the measured voltage (Vbus) to its reference (Vbusref) over 48 hours of operation.
Figure 18. Evolution of the DC bus voltage and the setpoint.
Figure 18 shows the evolution of the DC bus voltage (Vbus, in blue) compared to its reference set point (Vbusref, in red) over a period of 48 hours. This figure makes it possible to evaluate the ability of the conversion system to maintain a stable voltage, an essential condition for the proper functioning of the connected equipment.
It can be seen that Vbus closely follows the set point of about 400 V, with small point deviations. Slight ripples appear around t ≈ 6 p.m. and t ≈ 38.5 h, corresponding to rapid changes in PV load or production. However, these fluctuations remain contained, which testifies to the good dynamic stability of the voltage regulator. Overall, the bus voltage is precisely maintained around its set value, which confirms the effectiveness of the control system under normal operating conditions.
Analysis of battery current and battery bus curves
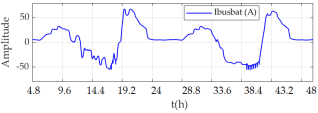
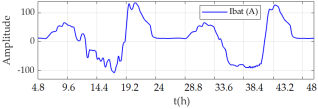
In
Figure 19, we present the evolution of the battery current (Ibatt) as well as the current exchanged with the DC bus (Ibusbat), allowing us to analyze the charging and discharging phases over 48 hours of operation.
a) Evolution of the battery as a function of time
Figure 19. Evolution of the battery current and the current exchanged between the battery and the DC bus.
Figure 19 shows the evolution of the battery current (Ibatt) and the current exchanged between the battery and the DC bus (Ibusbat) over a period of 48 hours. These two quantities make it possible to evaluate the charge/discharge dynamics of the battery as well as its interaction with the rest of the system.
The Ibatt current (upper figure) shows clear alternations between positive values (charge phase) and negative values (discharge phase). The positive peaks observed around t ≈ 7 p.m. and t ≈ 43 a.m. reflect phases of intense recharging, generally synchronized with peaks in photovoltaic production. Conversely, the discharge phases (negative current) appear in the evening and during the night, especially around t ≈ 14–18 h and t ≈ 38 h, when the battery compensates for the lack of solar production.
The Ibusbat current (lower figure), representing the current actually injected or taken by the battery on the DC bus, follows the same dynamics as Ibatt, with smaller amplitudes. This is due to internal conversions and possible losses in the power stages. There is a temporal coherence between the two curves, with simultaneous charge/discharge transitions.
The rapid changes visible around t ≈ 38.5 h indicate a dynamic response of the system to fluctuations in load or production. The absence of major instabilities confirms an efficient management of the stored energy. These curves highlight the central role of the battery in the energy balancing of the system, ensuring continuity of service despite the intermittency of the photovoltaic source.
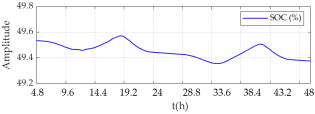
After analyzing the charging and discharging currents of the battery (Ibat) as well as the energy exchanges with the DC bus (Ibusbat), we present in
Figure 20, the evolution of the State of Charge (SOC) of the battery over a period of 48 hours.
Figure 20. Evolution of the battery's state of charge (SOC).
Figure 20 shows the evolution of the battery's State of Charge (SOC) over a period of 48 hours. The SOC remains overall around 49.4% to 49.6%, with small daily variations. These small oscillations reflect an energy balance between the load phases (during periods of high photovoltaic production) and the discharge phases (when the system load is sustained and solar production is absent). The stability of the SOC in this restricted range confirms efficient energy management, avoiding both overload and deep discharge. This behaviour indicates that the control strategy ensures operation in a quasi-steady state, with moderate stress on the battery, which is favourable to its longevity.
Battery Voltage Variation (Vbat) Analysis:
In
Figure 21, we observe the evolution of the battery voltage (Vbat), allowing us to evaluate the impact of the charge and discharge cycles over a period of 48 hours.
Figure 21. Variation of battery voltage (Vbat).
Figure 21 shows the change in battery voltage (Vbat) over a 48-hour period. It can be observed that Vbat evolves between 195 V and 208 V, reflecting the successive cycles of charge and discharge.
The voltage increases, which can be seen in particular around t ≈ 14–18 h and t ≈ 34–38 h, correspond to charging phases, generally synchronised with photovoltaic production. Conversely, the voltage drops observed around t ≈ 7 p.m. and t ≈ 42 a.m. reflect more sustained periods of discharge, in the absence of solar production. Despite these variations, the voltage remains within a controlled operational range, with no critical overload or undervoltage, which confirms efficient storage management and good battery sizing. The rapid ripples observed around t ≈ 38.5 h are related to fast charge/discharge transients, but do not compromise the overall stability of the system.
Analysis of power flows in the solar pumping system:
Figure 22. Pbuspv (PV), PLoad (charging) and Pbusbat (battery) powers in Kw.
In
Figure 22, we observe the evolution of the key powers in the hybrid system over a period of 48 hours: the power injected or taken by the battery (Pbusbat, in red), the power consumed by the load (PLoad, in black), and the power produced by the photovoltaic array (Pbuspv, in blue).
PV production (Pbuspv) has two active periods, between t ≈ 9–19 h and t ≈ 33–43 h, corresponding to the hours of sunshine. Production peaks partly coincide with peak loads, but are not always sufficient to cover demand, especially during consumption peaks in the evening.
The battery plays a buffering role: Pbusbat is positive when the battery is charged (excess PV production), and negative when it is used to power the load in the absence of solar production. The rapid transitions around t ≈ 7 p.m. and t ≈ 42 h. illustrate the dynamic response of the system to simultaneous variations in production and demand. These curves confirm a reactive and balanced energy management, ensuring continuity of service while making the most of the intermittency of the photovoltaic source.